ToddlerBot – 斯坦福大學(xué)開源的機器學(xué)習(xí)與人形機器人平臺
在人工智能和機器人技術(shù)飛速發(fā)展的今天,開源項目為研究者和開發(fā)者提供了寶貴的資源和工具。ToddlerBot,由斯坦福大學(xué)開發(fā)的開源機器學(xué)習(xí)與人形機器人平臺,正是這樣一個令人興奮的項目。它不僅為高效收集大規(guī)模、高質(zhì)量的訓(xùn)練數(shù)據(jù)而設(shè)計,還具備強大的運動和操作能力,適用于廣泛的研究和應(yīng)用場景。本文將詳細(xì)介紹ToddlerBot的功能、技術(shù)原理及其應(yīng)用場景,幫助你全面了解這一開源平臺的優(yōu)勢。
ToddlerBot 是什么?
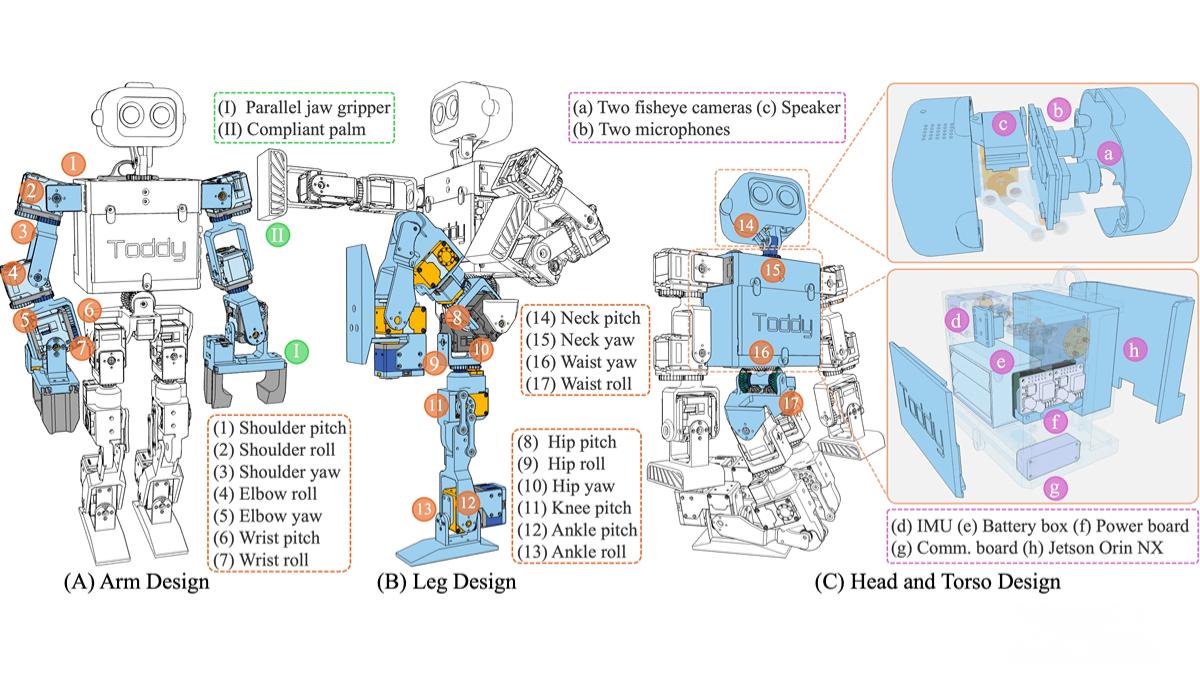
ToddlerBot 是斯坦福大學(xué)開源的機器學(xué)習(xí)與人形機器人平臺,專注于高效收集高質(zhì)量的訓(xùn)練數(shù)據(jù)。它具備30個主動自由度,采用Dynamixel電機,總成本控制在6000美元以內(nèi),性價比極高。通過數(shù)字孿生技術(shù)和零點校準(zhǔn),ToddlerBot實現(xiàn)了模擬到現(xiàn)實的零樣本轉(zhuǎn)移,支持遠(yuǎn)程操作設(shè)備高效收集現(xiàn)實世界數(shù)據(jù)。其開源設(shè)計和詳細(xì)組裝手冊使其易于復(fù)制和維護,適合廣泛的研究應(yīng)用。
ToddlerBot 的主要功能
-
高效數(shù)據(jù)收集 ToddlerBot能夠同時在模擬環(huán)境和現(xiàn)實世界中收集高質(zhì)量的訓(xùn)練數(shù)據(jù),支持大規(guī)模機器學(xué)習(xí)任務(wù)。這種能力使其成為研究者和開發(fā)者進行數(shù)據(jù)驅(qū)動研究的理想工具。
-
全身運動與操作 ToddlerBot具備30個主動自由度,能夠執(zhí)行復(fù)雜的全身運動和操作任務(wù),如步行、推-ups、拉-ups、雙臂操作和全身操作。其靈活的運動能力使其在多種場景中表現(xiàn)出色。
-
零樣本模擬到現(xiàn)實轉(zhuǎn)移 基于高保真數(shù)字孿生技術(shù)和電機系統(tǒng)識別,ToddlerBot能夠?qū)崿F(xiàn)從模擬到現(xiàn)實的無縫策略轉(zhuǎn)移,無需額外的樣本數(shù)據(jù),大大提高了研究效率。
-
遠(yuǎn)程操作與數(shù)據(jù)收集 ToddlerBot配備直觀的遠(yuǎn)程設(shè)備,支持基于人類演示快速收集現(xiàn)實世界數(shù)據(jù),可用于學(xué)習(xí)運動技能。通過力敏電阻和手持游戲電腦(如Steam Deck或ROG Ally X),操作員可以直觀地指導(dǎo)機器人完成復(fù)雜任務(wù)。
-
人機交互與協(xié)作 ToddlerBot支持多機器人協(xié)作任務(wù),如共同完成房間清理等復(fù)雜場景。這種協(xié)作能力使其在家庭、教育和工業(yè)等領(lǐng)域的應(yīng)用潛力巨大。
ToddlerBot 的技術(shù)原理
-
數(shù)字孿生與零點校準(zhǔn)
-
數(shù)字孿生:基于精確的物理模型和系統(tǒng)識別技術(shù),創(chuàng)建高保真的模擬模型,確保模擬數(shù)據(jù)與現(xiàn)實世界的一致性。
-
零點校準(zhǔn):使用3D打印的校準(zhǔn)設(shè)備,快速校準(zhǔn)機器人的零點位置,確保運動控制的準(zhǔn)確性。
-
電機系統(tǒng)識別(SysID):通過命令電機跟蹤掃頻信號,收集位置跟蹤數(shù)據(jù),擬合執(zhí)行模型,確保動態(tài)參數(shù)的準(zhǔn)確性,使機器人在模擬和現(xiàn)實世界中具有相同的運動特性。
-
-
遠(yuǎn)程操作技術(shù) ToddlerBot使用第二個上肢作為遠(yuǎn)程操作設(shè)備,基于力敏電阻和手持游戲電腦(如Steam Deck或ROG Ally X)控制機器人的運動。這種設(shè)計支持人類操作員直觀地指導(dǎo)機器人完成復(fù)雜任務(wù)。
-
強化學(xué)習(xí)與模仿學(xué)習(xí)
-
強化學(xué)習(xí)(RL):基于MuJoCo和PPO算法訓(xùn)練步行和轉(zhuǎn)向策略,輸出關(guān)節(jié)位置設(shè)定值,實現(xiàn)高效的運動控制。
-
模仿學(xué)習(xí):通過遠(yuǎn)程操作收集現(xiàn)實世界數(shù)據(jù),訓(xùn)練擴散策略(Diffusion Policy),實現(xiàn)復(fù)雜的操作任務(wù)。
-
ToddlerBot 的應(yīng)用場景
-
家庭玩具整理 兩個機器人協(xié)作,一個負(fù)責(zé)撿玩具,另一個負(fù)責(zé)推車,共同完成玩具收納。這種場景展示了ToddlerBot在家庭環(huán)境中的實際應(yīng)用潛力。
-
教育編程平臺 學(xué)生可以通過編程讓ToddlerBot完成步行、推-ups等任務(wù),使其成為教育領(lǐng)域的理想工具,幫助學(xué)生學(xué)習(xí)機器人控制和編程。
-
實驗室運動技能研究 通過強化學(xué)習(xí)訓(xùn)練,ToddlerBot可以完成跳躍、攀爬等高難度動作,為運動技能研究提供了強大的實驗平臺。
-
家庭陪伴機器人 ToddlerBot可以與兒童互動,完成拼圖或運動游戲,成為家庭陪伴機器人的重要候選。
-
工業(yè)零部件操作 ToddlerBot能夠操作小型電子元件或機械零件,適用于工業(yè)自動化場景。
ToddlerBot 的項目資源
-
項目官網(wǎng):https://toddlerbot.github.io/
-
GitHub倉庫:https://github.com/hshi74/toddlerbot
-
arXiv技術(shù)論文:https://arxiv.org/pdf/2502.00893
ToddlerBot作為斯坦福大學(xué)開源的機器學(xué)習(xí)與人形機器人平臺,憑借其高效的數(shù)據(jù)收集能力、強大的運動操作性能以及零樣本模擬到現(xiàn)實轉(zhuǎn)移技術(shù),正在為機器人研究和應(yīng)用領(lǐng)域注入新的活力。無論是研究人員、開發(fā)者還是教育工作者,ToddlerBot都提供了豐富的資源和可能性。如果你對機器人技術(shù)感興趣,不妨訪問其官網(wǎng)和GitHub倉庫,深入了解這一開源項目的潛力和價值。