在人工智能領域,3D多模態模型一直是研究和應用的熱點。傳統的3D編碼器架構在處理點云數據時存在分辨率限制和語義嵌入不匹配的問題。為了解決這些問題,上海AI實驗室推出了ENEL(Exploring the Potential of Encoder-free Architectures in 3D LMMs),一款創新的無編碼器3D大型多模態模型。ENEL通過直接處理點云數據,實現了高效的語義對齊和多任務處理能力,為3D理解任務帶來了新的突破。
ENEL的核心優勢
-
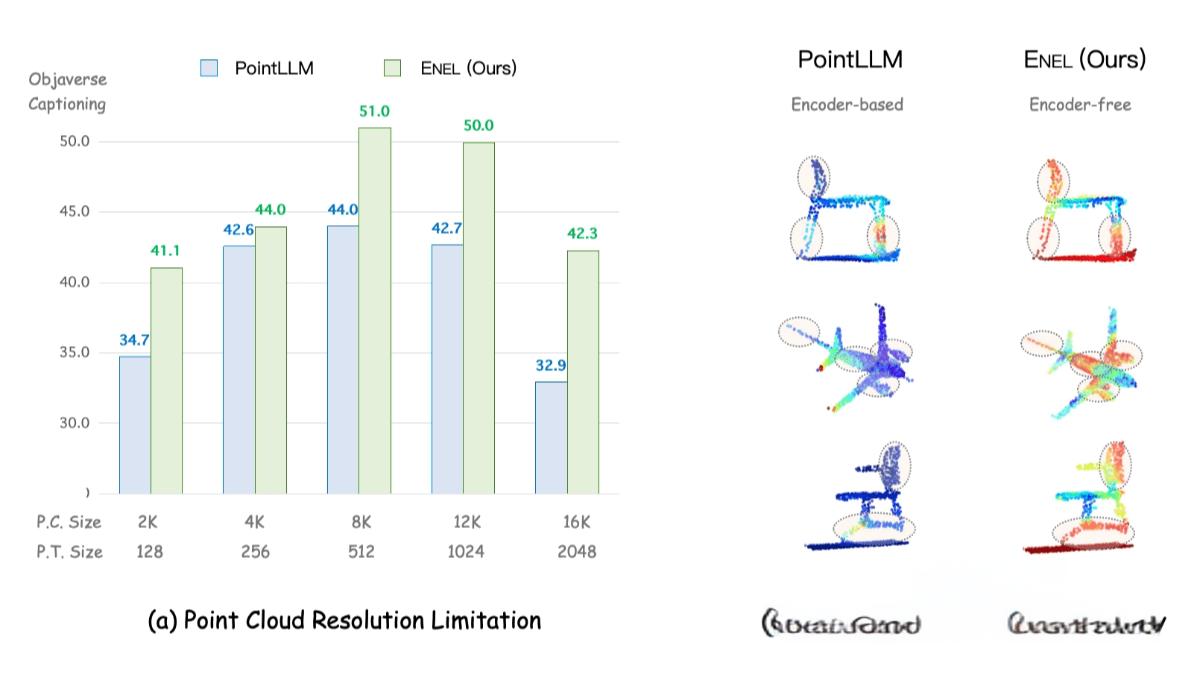
無編碼器架構 ENEL去除了傳統的3D編碼器,直接將點云數據通過標記嵌入模塊轉換為離散點標記,與文本標記拼接后輸入到大型語言模型中。這種架構避免了編碼器中常見的點云分辨率限制和語義嵌入不匹配問題,顯著提升了模型的效率和準確性。
-
高效語義對齊 ENEL通過LLM嵌入的語義編碼策略,在預訓練階段引入混合語義損失(Hybrid Semantic Loss),能夠提取點云的高級語義特征,同時保留關鍵的幾何結構。這種策略使ENEL能夠更好地捕捉點云與文本之間的語義相關性,為3D多模態任務提供了強大的語義基礎。
-
多任務處理能力 ENEL在多個3D任務中表現出色,包括3D對象分類、字幕生成和視覺問答(VQA)。在Objaverse基準測試中,ENEL-7B模型的分類準確率達到55.0%,字幕生成任務的GPT分數達到50.92%,性能與13B規模的ShapeLLM相當。
ENEL的技術原理
-
LLM嵌入的語義編碼 在預訓練階段,ENEL通過探索不同的點云自監督損失(如掩碼建模損失、重建損失、對比損失和知識蒸餾損失),提出了一種混合語義損失(Hybrid Semantic Loss)。這種損失函數能夠將點云的高級語義信息嵌入到LLM中,替代傳統3D編碼器的功能。
-
分層幾何聚合 在指令調優階段,ENEL引入了分層幾何聚合策略。通過在LLM的早期層中對點云進行聚合和傳播操作,ENEL能夠關注點云的局部細節。具體而言,使用最遠點采樣(FPS)和k近鄰(k-NN)算法對點云進行下采樣和聚合,逐步整合點云的細粒度語義信息。
ENEL的應用場景
-
工業自動化 ENEL能夠高效識別和分類復雜的3D物體,適用于工業自動化和機器人視覺領域。
-
虛擬現實與增強現實 ENEL可用于生成3D模型的描述性文本,幫助用戶快速理解3D場景中的關鍵信息,適用于虛擬現實(VR)和增強現實(AR)工具。
-
醫學影像分析 ENEL能夠回答與3D場景相關的問題,例如在醫學影像分析中幫助醫生快速獲取關鍵信息。
-
建筑設計與珠寶設計 ENEL能夠精確理解復雜幾何結構,適用于航空航天、汽車制造和珠寶設計等領域。
項目資源
-
GitHub倉庫:https://github.com/Ivan-Tang-3D/ENEL
-
arXiv技術論文:https://arxiv.org/pdf/2502.09620
未來展望
ENEL的無編碼器架構和高效語義對齊能力為3D多模態模型的發展開辟了新的方向。隨著技術的不斷進步,ENEL有望在更多領域中發揮重要作用,推動3D理解任務的智能化和高效化。
總結
ENEL作為一款創新的無編碼器3D大型多模態模型,通過高效的語義對齊和多任務處理能力,為3D理解任務帶來了新的突破。無論是技術研究人員、開發者還是企業用戶,都可以從中受益。如果你對3D多模態模型感興趣,不妨深入了解ENEL的技術細節和應用場景,探索其在實際業務中的潛力。